
����ʧ�ٻ������������Դ��X-31A�ĵ���
�ڵڶ��������սʱ�ڣ������ܽ��ս�������п�ս�Ĵ����Ҫ�����ٶȡ��߶ȡ������Ժͻ����������ٶȱ�������λ������˼�����Ӱ����ս���һ������ս�����������뷢չ��������Խ��ս�������Ƿ���ս�������ٶȲ�����Խ��Խ�ã���Ϊ�ֿ�ս�������������½��еģ����Ը��ٶ�Ϊָ����Ƶ�ս�������Լ�����ǡ�����������Ļ������ܣ�ͬʱ���и߶ȶ���ս������˵Ҳ����ô��Ҫ�ˣ���Ϊս�������������ڻ���������ս��Ϊ���ͷɻ����������и߶Ȳ���̫�ߣ���˶�ս�������ǡ�����������Ļ�����Ҫ����������˸�Ϊ��Ҫ�ĵ�λ��������ʶ��Ϊ��Խս������ս�������Ƶ�ָ��˼�룬�����˾��и����رȡ������ںϺ�ͨ�������������������������ĵ�����ս����(����)��F-15��F-16����-29����-27����Ӱ-2000�ȵĵ�����
������ս�������ص�������ʵ��ϵͳ�ۺϻ�����һ�ַɻ���Ϊ����ƽ̨��ͨ�������豸������ϵͳ�IJ��ϸĽ���Ϊ��ܵĿ�����սƽ̨�����а����Ƚ�������������״�Ϳ����Ӿ��ⷢ��Ŀտյ�������ʹ�����ǡ�������������������ܵ����˼���ܵ���һ�����ɣ����ս����ʹ���о�տյ������Ӿ�������л�����ô������еĸ�����������ʲô�����أ�Ȼ�����Ǻܿ�㷢�������о�տյ�������ȷ�����㹻�ľ����Ͽɿ����������ел�������ʤ������������Ҫͨ��������У����ǣ�ͻ���˵�����ս��������������Ƽ������Ƚ�����֮�俪չ����һ����ǿս�����������ܵļ���������
�����ս��������Ҫ��Ҫ���Ǿ��иߵ�˲ʱ��������(���ߵ����˲ʱ�������ٶȡ��Ӽ���������)���������ڽ��й���ʱ���ٵؽ�����������ָ�������ܽ��Լ�ʼ�մ��ڶ���ת��뾶���ڲ࣬�����Ƚ��빥��λ�ò��ȵп��������������Ŀ��ƶ��棬����Ա���Կ��Ʒɻ��ĸ������ٶ�(ͨ����/�����ݸ˿���������ƫ��ʵ��)����ת���ٶ�(ͨ��ѹ�˿��Ƹ���ƫת��ʵ��)��ƫ�����ٶ�(ͨ���ŷ��������ƫ��ʵ��)��������ٶ�(ͨ�����Ÿ˺ͼ��ٰ����ʵ��)�����Ǵ�ֱ���ٶȺͺ�����ٶ�ȴ���ܺܺõؿ��ƣ����Ϊ��һ����߷ɻ��������ܣ��б�Ҫʹ�ɻ������������ɶ��Ͼ�����Ч�Ŀ����������������ν�ġ��dz����������
�dz�������ļ���ʵ���С�ֱ�������ƻ�����(DFCM)�͡���ʧ�ٻ�����(PSM)����(��Ȼ����Ҳ���Խ������)��ǰ����ָ�ڲ��ı�ɻ�������̬������£�ͨ���ʵ�������ֱ���ṩ���ӵ������������ʹ�ɻ�����ֱ���������ƽ���˶����ı�ɻ��ĺ�����Ŀǰ�����������Ƽ���(ACT)/��ز���(CCV)�ɻ����Ѿ�����������������ͨ��������������������ʵ��ֱ�������ƣ������ǰ��Ե�����Գ�ƫת��ˮƽѼ���Գ�ƫת���Ϻ�Ե����ƫת�ȷ���ʵ�ַɻ�����ˮƽ��̬���������½������÷�����Ϸɻ�����ǰ��ƫ��������ʵ�ֲ���ƽ�Ƶȣ�Ȼ������֤���������������������Ŀ��Ʒ�ʽЧ������������������ǿ�ʼ���۹⼯�е�����ʧ�ٻ�����������
�ڴ�ͳ�ķ��������У��ɻ���ӭ���Dz��ܹ�����ʧ��ӭ�ǵģ�����ͻ�ʧ�٣�����β�������١������о�����������ս�������еȵ���ӭ��ʱ�IJ��ȶ��Ⱥ�ƫ�����غܴ����ֲ��ȶ���Ҫ�����������ͷ��������ȱ�ݺͻ����˶����ܵ�С�Ŷ�֮��������ɵ�ǰ�������Գ�β�������⣬��Ȼ��̬������������ʹ���ǶԴ�ӭ�Ƿ��еĿ������������Եõ�һЩ�˽⣬����Щ��������ܾ�ȷ�����ڼ��綯̬�������й�������Ԥ�ڵ�����Ӱ�졣�������˶������������ѱ仯��λ�ñ仯���»����ϵ�ѹ�������ܴ�ı仯����һ���Գ�Ϊ��̬ʧ�٣�����ɻ��Ŀ���ϵͳ���ھ�̬Ҫ����̬ʧ�ٶ���Щ�ɻ����ȶ��ԺͲ����Ե�Ӱ�콫�Ǻ����صġ������ִ����տƼ��ķ�չ���ر����������¼��ֹؼ������ij��֣�ͻ������һ����ͻ�Ƶ�ʧ�ٱ߽��ѳ�Ϊ���ܣ���Щ������������A���ܴﵽ������ܵĴ����رȷɻ���ƣ���B�����ÿ��������ƽ��Ķ�������ʸ����������C���Ƚ�����ʽ���п���ϵͳ������Ч�ۺϻ�����ƽ�ϵͳ���ƴӶ���������չ�ķ��а�����ʵ�֡������ǡ����ݡ�
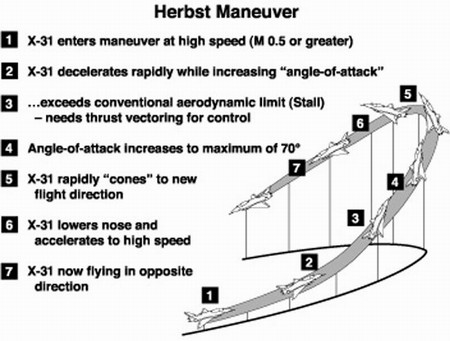
80�����������¹��ĺղ�˹��(Wolfgang Herbst)���������ʧ�ٻ����ĸ�����ɻ��ӳ������״̬����������Ƕ�Ծ��ʹӭ�Ǵﵽʧ��ӭ�ǣ��Դ����ս����Լ��30�㡫40�㣩�����ڼ��ٹ�����ʹӭ�Ǵﵽ70�㣬���ٶȷdz�С��״̬�£�Ѹ�ٸı�ɻ��ٶ�ʸ���ͻ�ͷָ���һ�ֻ�����ʽ��һ��˵���ɻ������˲ʱ�������ٶ���������0.4��0.6֮���������Ҫ�ڸ�����ȡ���ƣ���Ҫ��ɻ��ܴ��������������ؼ������С����ٶȣ����ɻ��ڽ��й�ʧ�ٻ���ʱ�����ڴ�ӭ���������ܵ������������ϴɻ����ٶȿ���Ѹ�ٽ��͡����ٶ��½���ÿСʱ��ʮ����ʱ������Ա���Ʒɻ������ᡢ��������������ת���Ӷ���ʹ��ͷ����ָ�����ⷽ������Ƹ˼�Сӭ�Ǵӹ�ʧ��״̬���˳������и������ٲ��ָ����������״̬���ڹ�ʧ��״̬�·ɻ���˲ʱ�������ٶȱȳ������˲ʱ�������ٶȿ������һ�����ң���ͷ����ָ��������пɷ������ȫ���ʹ����ṥ�������Ƚ������Եз����й�����
1986��6�£������͵�ʱ������¹�����ǩ����һ�ݹ������Ͻ��С���ǿս���������ԡ�(EFM)�ƻ��о����½ⱸ��¼���üƻ��������������о��ƻ���(DARPA)ǣͷ������¹��������ļ����ƻ������Լ��������ķ�ʽ����üƻ���Ϊ�üƻ��ķ�չ���о������Ǵ���������X-31A����ǿս���������ԡ���֤�����û���Ҫ�����о���߽����ս�������ķ������Ļ���Ŀ����Ҫ���뵱ʱ��ս�����������漰��ʧ�ٺ�ķ��а��ߣ��÷ɻ��ܹ��ںܴ��ӭ�Ǻͺܵ͵��ٶ��·��У�ʹ����и��ߵ�ת����ٶȣ����߱�����ʧ�ٻ��������ܣ��Դ˻�ÿ�ս���е�ս�����ơ�
X-31A������ص�
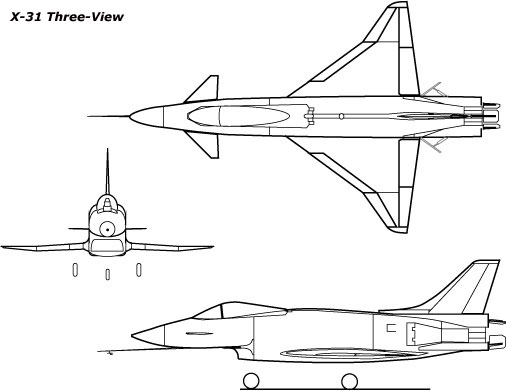
X-31A����Ʒ�������������HiMAT����ң���о�����Ŀ�͵¹����˾TKF-90��Ŀ���о��ɹ�����������ģ�������ƴ�1986���ʼ��1987��8����ɣ������������ܷɻ�(��Ϊ1�Ż���2�Ż�)�������������μ��ṹ�����������Τ�����ʹ�˾���𣬷��п���ϵͳ����������������ɵ¹����˾(��ķ��-���ۺ��˾)����
��X-31A������������ƣ�
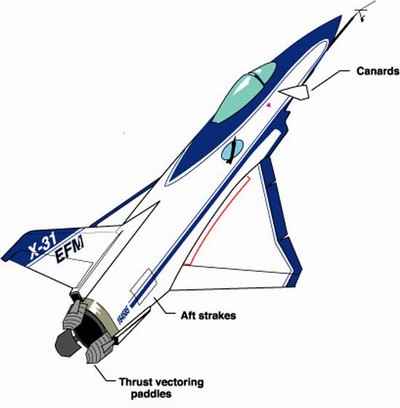
X-31A����Ѽʽ���֣�����Ϊ˫�������µ���������֪������������ͨ������Сչ�ұȺʹ���ӽǣ����п����������������ã����ŷ����������仯�������ĵ��ƶ�С�������нϺõ�ǿ�ȡ��նȺ��������ԣ��ѱ������ٷɻ��㷺���ã����ǣ�����X-31A���ԣ������������ƽֱ��������ͨ���������������ʧ��ӭ�Ǵ��ڴ�ӭ�Ƿ���ʱ�����ܱ��ֽϴ�������������������ѡ���X-31A�ij����ٷ��кʹ�ӭ�ǻ����Ƿdz��ʺϵġ���Ȼ������Ҳ������е�һЩȱ�㣬����������������ϵ����ӭ�ǡ�����б�ʵͣ�����һ��ӭ�Ƿ�Χ�ڣ�������ϵ����ӭ�ǵ��������ӵñȽϻ�������˶Էɻ��������ٷ������ܺ���½��������ܶ���������Ӱ�졣���⣬��ӭ�ǽϴ�ʱ������ǿ�ҵ���ϴ�������⽫��ƽβ�ڴ�ӭ������ƽ���ܵ÷��Ӳ�������Ӱ�죬����X-31A����Ѽʽ���ֵ�ԭ��֮һ���������������ӽDz�ͬ���ڶ�1/4���ߺ��ӽ�Ϊ48��6�@����λ���1/4���ߺ��ӽ�Ϊ36��36�@���ɼ�˸ߵ��ٷ������ܣ���һ������������и��õĴ�ӭ�Ƿ������ܡ�
���⣬X-31A����������������Ťת�ͼ���Ťת���Է�ֹ����ӽ�ʱ����ʧ�٣������������µ����������ǿ��ǵ�������Ѽʽ����ǰ�����Ӱ�졣
X-31A����ͼ
X-31A��Ѽ��Ϊȫ��ʽ��ƫת�Ƿ�Χ��-55�ȣ�ǰԵ���£���+20�ȡ���X-31A����ǿ�ȵĻ���������������С�뾶����ʱ��Ѽ���������϶������ǿ������������������������������Ϻ���ǿ�������ȳ��沼�ָ�ǿ��������������������⣬Ѽ�������ڸ��ƿ����ٹ����а����Լ����½������⣬ͬʱҲ�ɼ��ٷɻ�����ƽ����(�����ڳ����ٿ�ս)�����⣬Ѽ�������ڽ���ʱƫתһ���ܴ�ĸ��ǣ����ٰ�����á�Ѽʽ���ֵ��ѵ���Ѽ��λ�õ�ѡ���Լ���ӭ�Ǹ����������������⡣��Ѽ������������������֮ǰ�����������ڴ�ӭ��ʱ�������أ�������β�ɻ����ԣ���α�֤�ڴ�ӭ�Ǿ����㹻�ĵ�ͷ���س�Ϊ���⣬X-31A��������ʸ��������Ӧ�ã�ʹ��������Խ����
X-31A������ƽ���Ϸ���Ϊ0�ȣ����Ͳ�����Τ�����ʹ�˾�Ŀ��������ͣ���Ժ��Ϊ5.5%�������Ϸ��Ǿ��к����ȶ�������,���ɻ����ȶ������������������ģ��ȶ��Ժ�����ζ�Ż����Բ�����X-31Aȡ0���Ϸ��ǵ����ɣ�������Ժ�ȵ�ѡ����Ҫ����������Ӱ�죬������״̬�¶�����Ӱ�첻���ڿ�����ʱ�������Ӵ�Լ����Ժ�ȵ�ƽ�������ȣ����Ӧ����ѡ����Ժ�Ƚ�С�����ͣ�������̫С������Ӱ��ṹ�߶ȼ������Ŀ������������Գ�����ս����������Ժ��һ����4%��6%֮�䡣�ɼ�X-31A�����Ϳɱ�֤���ڵ��ٴ�ӭ�ǻ����ͳ����ٷ���ʱ�����нϵ͵�������
X-31A����ǰԵ����������ǰԵ��������Ե�����ν���(���������ͽ��й�ת����)��ǰԵ������X-31A��ӭ�ǻ�������ʱ�ɽ�������ƫת����������С�˻���ǰ�˵ľֲ�ӭ�ǡ��ɶ�ǰ���������е���,��֤����ǰԵ���������룬��ֹ���緢��ʧ�١����⣬����Ա��ͨ�����п��Ƽ��������ֱ�Ӱ�ť��ͬ��ƫת����������������ӵĸ������أ�ˮƽǰ���ͻ��ڷ��п��Ƽ������ָ�����Զ�����Ӧ��ƫת��������ֵ������ĸ��������Ա���ӭ�Dz���(���Զ����и�����������ƽ)�����������ƹ����У���ʻ�˺�λ�ƶ��������仯�����������˶���ʽ�ɻ�����ı�ӭ�DZ���������½������������ڸ�����̬���������ڷɻ�����ƽ�ƹ����У����п��Ƽ��������ָ�����ƫת�������ʵ���ƫת���غ�ת���أ��Ա��ַɻ��Ļ�ͷ�����ˮƽ��̬���䡣
X-31A���Ǵ���д
��X-31A�Ķ���װ��������ʸ����ƣ�
����ʸ��������ָͨ��ƫת�����������ķ����ö���������صļ�������ͨ�ɻ�ͨ����Сӭ���·��к���ս��������״̬�·ɻ��Ļ�����β�����ܹ������㹻�������������������Ч�����Ա�֤�ɻ���������Ҫ�����ɻ�ӭ������ʱ������������������ص�Ӱ�죬�ɻ������潫���ܲ����㹻�������Ա��ֶԷɻ���̬�Ŀ��ƣ���ʱ��ʹ�ɻ�����������������Ҳ��ʹ�ɻ��ڿ��б���ƽ�⡣Ȼ�����ɻ�����(����)����ʸ������֮�����ڷ��������������ƫת�����������������ɲ�ͨ���ɻ������ģ��Ӷ��γɿɿ��Ʒɻ�������̬�ĸ������أ���ʱ�����ͷ����˺ͷɻ���������ͬ������(���ǵı�����������ǰ����һ��ֱ���������ֶ�)�����������IJ���ֻ�뷢�����й�ϵ������ֻҪ���������ڳ���ʧ��ӭ�ǵ������¹������������ܹ�Ϊ�ɻ��ṩ��ƽ����(����Ҫ�ڴ�״̬�±����ȶ�����,��Ҫ�������ʱ���ܲ����㹻����)��
��������ʸ�������ɻ�������ֱ�������Ʒ�ʽ�ṩ�Ŀ������ز��ܷɻ�������̬��Ӱ�죬���Ա�֤�ɻ��ڲ��ݶ��漸��ʧЧ�ĵ��١���ӭ����������������ʸ���ṩ�Ķ���������������Ʒɻ����������Ĵ�ս����������4SҪ���а������������ԡ�(����3SΪ������������Ѳ���Ͷ̾�����)���������ʸ�������ǵ��Ĵ�ս��������Ҫ��������֮һ��
Ŀǰ������ʸ�������Ѿ���չ�������ͬ����ʽ����Ҫ����������ʽƫ����ڡ���ά����ʸ����ܺ���ά����ʸ����������֣����ж�ά����ʸ��������ṩƫ���������أ�����ά����ʸ����ܿ������ⷽ���ƽ����ṩ�ɻ����ⷽ�������ʸ�������������Ƹ��ӣ�Ŀǰ����������ҵ��о��ص㡣
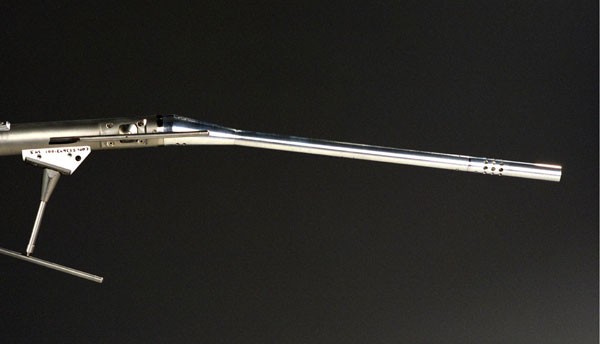
X-31A���õ���������ʽƫ����ڣ�3��̼-̼����ҶƬ�Ʒ�����Բ�ܶԳ����ã�ÿö����ҶƬ���ܸ�������������̼������㣬�Ҿ��ɵ������¶�װ��������1��ҶƬ���ô��ڴ�ֱβ�������棬����������������ɡ���ʽ���������ƫת7�ȡ�2�ź�3�ŵ���ҶƬλ�ڻ������°벿�м�λ�ã������Ǵ�60�ȵ�������λ��ʱ�ɳ䵱���ٰ�ʹ�á�ͨ��ƫת����ҶƬ���ṩ������ƫ������Ŀ����������ƫת�Ƕ�Ϊ35�ȣ��������������ά����ά����ʸ�����������������ס�����������ڴ������������ֻ�ܽ���������ı��15�ȣ�����ijЩ������״̬�Լ�������β��������С������������ı仹�ﲻ��15�ȡ�����ҶƬ��Һѹ�����������Ͽ�ʹҶƬ�ﵽ80��/������ƫת���ٶȣ�����X-31A�ɿ�������ÿöҶƬ��ƫת���ٶ�����������60��/�룬������Ϊ��ӭ�Ƿ���ʱ�ɻ�����Һѹ�������Ҫ�����������ܷ��������ҶƬ��ƫת��Һѹ�����������Դﵽ80��/���ƫת���ٶȡ�X-31A�ĵ���ҶƬ��β������ƫת���ٶ�֮�ȴ���Ϊ1.5��1�����������ʸ����ƫת���ٶ����ɴ�40��/�롣
X-31A����ҶƬƫת�Ƕȴ�С������������ɷ���(������Ȼ��,��Ϊ�����������Ҫ���������Ŀ�������, ����ҶƬ�ͱ���ƫת����ĽǶ���ʹβ��������ı�ø���)����X-31A�÷ɿ�ϵͳ�У������ɷ�����β�����������Ÿ˽Ƕ�(PLA)�뷢������ѹ�������й��㣬���ֹ����ȷ�Զ�����ʸ������ϵͳ���������ȼ�����ƫת����������Ҫ�ģ���Ϊ��������������ʹ����ҶƬ��ƫת����λ���ﲻ������������Ҫ����������ʹ�ɻ�����Σ�գ���֮�ͽ�����ƫת������������ϣ���Ķ�����������Ҫ����ʸ��ʱ�����п���ϵͳ�ɷ�����β�������뷢������ѹ�ȼ����β�����״�����߽�Ĵ�С�����ݴ˽�����ҶƬ������β�����߽紦����ȷ���ڱ�Ҫʱȼ�����ƫת�ܹ���ʱ�ò��������ʸ��������

X-31Aβ��ڴ��ĵ���ҶƬ
X-31A����������ʸ�����Ʒ�ʽ��ȱ�����൱���Եģ��������ĵ���ҶƬ��ͬʱƫת26�����Ͽ��ܷ������ײ����������ڿ������������ʵ������ã����β�����״�����߽�ļ���һ�������¸û�����ʸ���Ŀ����ɺ�����п���ϵͳ�Ľ���൱����(�����ɺ�����п���ϵͳ�Ľ��������ʸ�������ܹ�ʵ�õ���ؼ�����֮һ)��������ö�ά������ά����ʸ����ڵĻ���Щ����Ϳ��Ե��õ��ܺõĽ��������ǵ���ҶƬ������ʹ���������⣬���鷢������F404-GE-400�������ȶ���ת30���ȼ������ƫ5�ȣ�����10�����ҶƬ�ͱ�����ת10��(��ת��β������5��)��ȴ15������ٴ�ʹ�ã������������ʽƫ����ڵĹ���ȱ�㡪������ʧ���⣬X-31A�ڵ���ҶƬ��ƫת�Ƕȳ���10��ʱ������ʼ������ʧ��ƫת��25��ʱ��������ʧ700ǧ������(1,600��)����������ʸ�����Ʒ�ʽ������ȱ�㣬������������X-31A�������������˼�ij���ӭ�ǻ������������������۸���ս��������ģ���սʱȡ�ü��ߵĻ�ʤ�ʡ�
X-31Aװ��������ͨ�õ�����˾˫ת�Ӽ���F404-GE-400���ȷ���������������71.17ǧţ(7 255ǧ��) ��������ر�Ϊ1.3��������λ�ڸ������ڴ�ӭ�Ƿ���ʱ����ǰ������ʹ����ת�����˽������ľֲ�ӭ�ǣ������˷������ڴ�ӭ���µĹ���������X-31A�ĸ����������Dz��ɵ��ģ�һ������Լ���������������رȣ���һ���澡�̶ܹ�ʽ�������ڿ�����ʱ������ѹ�ָ��½������·��������������½���������ڳ���������Ӱ�첻����Ϊ�ڽϴ�ӭ�ǻ���ʱ�ɻ�һ���ڸ��ĵ�λʣ����·��У������ȷɻ��Ŀ�������������Ҫ��ö࣬����������һ��˲ʱ״̬����˷������������½�����Ӱ�졣
��X-31A���п���ϵͳ������ɣ�
��ǰ����������ʸ���������õ�����ѵ�֮һ�ǿ����ɣ�X-31A�������֤ʵ������ʸ�����������ս���������Ժ�ս���������ã�ͬʱҲ�ڿ�������Ʒ���ȡ���˳ɹ�����˿�Ϊ���Ĵ�ս����������ʸ����ƺ�����ս����������ʸ���Ľ��ṩ����Ƹ���
X-31A�ɻ���һ�ܴ���Ѽʽ���ֵ������ȶ��������ɻ��������������������������ǶԳƵĺ�Ե������Ѽ�����ẽ�����Dz��Ե�����뷽��档���⣬����ʸ��ϵͳ���ڵ��ٺ�ʧ�ٷ����ڼ����ڲ�������������Ч�ܵIJ��㡣
X-31A���п���ϵͳ��һ��ȫȨ�����ֵ紫����ϵͳ��������̨���п��Ƽ������ÿ̨������CPU����ɣ�����һ̨��Ϊ���߶�·���ķ��п��Ƽ����֧�֡�����������̨���Ƽ����һ������ֻ��һ��CPU��һ�����ֵڶ�������ʱ�����ܹ�ѡ��ȫ��ͨ�������������ϵͳ�ɿ��ԡ�
�������ݸ�λ���ڷ��п������б궨Ϊ-1.0������Ƹˣ���+1.5��������ˣ������λ��ֱ�Ӷ�Ӧ��ӭ�ǻ����ָ��ڵͶ�ѹ����״̬ʱ�����п����ʴ���ӭ��ָ��ģ̬���ڴ�ģ̬��-1.0��ָ���Ӧ-10�ȵ�ӭ�ǣ�+1.0��Ӧ+30�ȵ�ӭ�ǣ���+1.5���Ӧ��+70��ӭ�ǡ�����ʧ�ٱ���ֹ��ӭ��ָ��������Ϊ+30�ȡ���+1.0ʱ��ʻ���˸�ϵͳ��������������Ա�ṩ���Ƿ���������ʧ��������Ϣ�����⣬�����ʧ��һ�ֻ��߶����Ⱦ��������ٸ������㣬����һ�����ֹ��ϣ�ӭ��ָ���Զ����͵�30�ȡ��ڴ�ѹ����£�-1.0��Ӧ��Լ-2.4G����+1.0ָ������7.2G���������������ı�7.2G�����ָ����Ƿɻ�������غɼ��ޣ�����������ָ��ϵͳ֮���ת��������30�ȵ�ӭ�Dz������7.2G�Ĺ��صķ���״̬�����Լ��380��/ƽ��Ӣ�ߡ�ֻ�зɻ�������ӭ��ָ��ģ̬ʱ����ʧ�ٷ��в��ǿ��ܵġ�
�ڷ��п������й�ת��λ�ö����Ǵӡ�1��������λ�ã���+1���Ҳ����λ�ã������ݷ���״̬��ͬ�����������ת���ٶȣ���Сӭ�Ǻ߶�ѹʱ�ߴ�240��/�롣����ת���ʰ�����״̬���꣬���ֶ���Ӧʹ��Ч����Ч�ܾ����ܶ��������̬��ת�������㹻�Ŀ���Ч�������ȶ��ͷ�ֹʧ�ع��ɡ�
��ʻԱ���Խ�ͨ�ͶϿ�����ʸ��ϵͳ��һ�����ֹ��ϣ�����ʸ�����Զ��ضϿ������п�������ʹ����������õ�����ָ���������������ʸ��������������ͬ��ֻҪ�ܵõ��㹻������������Ч�ܣ���������ʸ������ʱ������û�в���ڹ�ʧ��ʱһ������ʧ�����ֹ��ϣ���ò����㹻��ƫ�����أ������������Ӧʹ������ܵĵ͡����⣬��ת����Ҳ��������ʸ���Ͽ������͡����ڰ�ȫ��ԭ����ɺ���½ʱ����ʸ���Զ���ֹ��
�� ͷ����ʾ����
X-31�ڸߴ�70�ȵĴ�ӭ���½��пɿط��и�����Ա������һЩDZ�ڵ����⡣��һ�������ǣ����ڴ�ӭ��ƫ����ʱ��ʹ����Ա��ʧ�������Եڶ������������̬��ʶ���ڶ��������������ʹ�ã�ƽ����ʾ��������ʾ����������ϵͳ�������������ߣ���˷���Ա�ھ���ʹ�ú���ս������ʱ���ò�ƾ�������¡�ͷ����ʾ������������������һЩ����ġ�
X-31A�Է�����
X-31A���Էɹ��������������Է��������������պ���ָ������Է���Ҫ��������ǿս���������ԡ���֤����β���в��ԺͶ̾������������ݣ�����������£�

����ǿս���������ԡ���֤��
X-31A��1�Ż���2�Ż��ֱ���1990��10�º�1991��1��ʵ���ɡ�1991��2���״�����������ʸ�����ƣ�ͬ��5���״ν���ȫ������ʸ�����顣��Щ���в��Ծ�����Τ������ķ��������������ؽ��еģ�
1992��2�£�Ӧ�����������о��ƻ���(DARPA)��Ҫ��X-31�ɻ��ͷ�������ƻ�����ķ���������������ת�Ƶ��������պ����(NASA)
���ٷ����о����ġ�����������NASA�Ĺ�����Ա����ʩ�����������վ������������ĵIJ��룬�üƻ���ʼ������ӵģ�����Ҫ��������ϵĹ�ʧ�ٰ�����չ�Σ���ʧ�ٷ��е�һϵ���ش�ɾ;������ʼȡ�õġ�1992��9��6�գ��ɺ����Է�Ա����.����˹��35000Ӣ�߸߶������Ϊʱ45��ij���70�����ӭ���µ���ƽ�ȶ����С�����ͬһ��ʵ������70��ӭ����Χ�Ʒɻ��ٶ�ʸ��������ȫƫת��1G�����ٶ�ʸ����ת��11��6�գ���ʧ�ٰ�����չ�ij�ʼ�ν������ýι�������������Ҫ�������������棺һ�������ڹ�ʧ�ٻ�����Ҫ�൱��ĸ���������������ΧΪ15-22.5lb,���Ҹ���ָ�����ı��ţ�1mm�ļ�ʻ���������൱��1��ӭ�ǣ����Ҫ�����Ա˫�ֲ��ݼ�ʻ�˺�ע�����߶ȼ��У���һ���棬���ڻ�ͷ�ϲ������������������1G���ٻ����з������Գ��ԣ����Գ�����45��-55�ȵ�ӭ�Ƿ�Χ����ǿ���Ի�ͷ���β���IJ��Գ��Լ�Ϊ���У���Щ�е����Ӱ�����ƫ���ǣ�ʹ����ϵͳ���ܲ�������������㹻�Ŀ���Ч�ܣ�ͨ������ɰֽ״�ġ�ɰ�������ڻ�ͷ�IJ�ͬ��λ���Ӷ��ٳɽϸߵĶԳƶȣ�ȡ���˽Ϻõij�Ч��
1993��2��25�գ��¹������Է�Ա���������״γɹ������ȫ�ղ�˹�ػ������������ȣ���ʹ��̬����ﵽ���ӭ�ǣ�70��ӭ�ǣ������ŷɻ�ƽ��������Է��У��ɻ��������䱾���ļ��ٰ�����á����ɻ�����ʱ������Ա��ʼ���ݷɻ����ٶ�ʸ����ת-һֱ�غ�������������ֱ������ı�180��Ϊֹ���ڻ�ͷ�ͺ����ķ������ʼ�����෴ʱ������ͬ�ɻ���ж�ء�һ��������X-31�ɻ��ĸ����ر������ѷɻ����ٵ��ָ�����״̬�����뿪ʼ��30000Ӣ�ߣ��ٶ�ΪM0.4�����õ��ļ��ٺ�������ʱ11s,�ɻ���ɻ�ͷת��180�ȡ����ٲ��ָ�ˮƽ����״̬��Ҫ32s�����õ��������뾶��475ft������ͬ�ij��������뾶ԼΪ2500ft������һ���������dz���ɻ������������������ﵽ�ġ�Ϊ���������ʧ�ٻ�������ĺղ�˹��(Wolfgang
Herbst)��������л�ʱ������Ļ�������������Ϊ��Herbst��������ͬ��11��12���ڼ�X-31Aʵ����������1.28�ij����ٷ��С�1993���ǡ���ǿս�����������ƻ��ĸ߳���X-31A����һ����ͬʱ��������֤�ɻ�һ���Է�160�κ�һ�����Է�21�ε��Էɼ�¼��
�ղ�˹�ػ�����ͼ

X-31A����ղ�˹�ػ������ӭ��70�ȵ�ʱ��
1994��3��1��NASA�����X-31A��������ܵ��ۺ�������
1995��1��19�գ�X-31A��1�Ż�����ɴ�Լ43���Ӳ��Է��к�ķ���;�У����ٹ���20 000Ӣ��(6 096��)�ĸ߶Ȳ�����������·ɻ��ɿ�ϵͳ��ȷ��������ѹ�����ݶ�����Ϊ�ɻ����ڵ��ٷ��У���������£��ɻ�ͻȻ����������ӭ����Ȼ���ӵ�90�ȣ��û��Է�Ա����������¹��Ŀ����������ȵ������ʻ�գ��ɻ����ڰ��»��ȿվ������Ա�������ɳĮ�ش���û�е�����Ա������
1995���ϰ��꣬X-31A���ȫ������ǿս���������ԡ���֤�ƻ������ݡ�
�� ս��������
��ȻX-31��������ƻ��Ĵּ�������֤��ʧ��״̬�µ������ԣ����Ǻ����û��ɹ����ĸ����߶Ȼ���Ҫ�����ڽ�����еļ�ֵ����1993��11�µ�1994��2���ڼ䣬���������պ���ֵ��ٷ����о����Ľ�X-31A��F/A-18������1��1��ս��ģ�⣬������ս����������ʼ�������Ϳո��ߺ͵Ϳճ����٣����еģ���ս�Ľ��������עĿ�ġ����й�ʧ�ٷ��������ķɻ���ʤ64�Σ�������Ϊ32��1������4��ƽ����Ҫ�����ڽ�ս����90��δ�ֳ�ʤ����������һ�ܷɻ����͵�13000FT���������ܹ����߶��������ֻ����ƽ�����������Ϊ�����Ӳ��ù�ʧ���ڽ�ս����Ҫ�Ե��˽⣬Ϊ�˱�֤����ij�ַ�ʽ��X-31A�ɻ����������Եij������ƶ���X-31A�ɻ������䳣�����ܣ�����ʹ������ʸ�������ӭ��Ϊ30�ȣ��������������F/A-18��սʱ��F/A-18��16�ν�ս��ʤ12�Σ�X-31A�ɻ�������Ϊ1��3��
�ɼ��������������£���ʧ��ս���Ի�����ƻ����Ч���������ڹ�ʧ��ս�������Ÿ�������ʧ�Ϳ��ܷ��������ã����Բ�Ӧ�ó�ʱ��ʹ�ã�����ԱӦ��֤��������ʧ��ȡ���ٵл���
����β���в��ԣ�
��ֱβ������ɷɻ��Ĵ���Ψһ���ṩ�����ȶ����صIJ�����������������������ȶ����ã����Դ�β�ں����ȶ���������ʮ����Ҫ�����ã��еĸ��ٷɻ�Ϊ��֤�����ȶ��Ѵ�β�ͷ�������úܴ���ʹ�ɻ��������������ӣ��ҼӴ�ɻ�������ƽ�Ѷȣ�����˫��β������һ���̶��Ͽɽ��������⣬�����뵥���������βһ�������ؽ��ͷɻ������������ܡ���������������ʸ��������ȡ����ֱβ�����к�����ƣ����Ϊ����X-31A�����ⷽ��������ṩ�˿��ܡ�
1994�꣬�ڳɹ���ɹ�ʧ�ٻ���������֤֮��NASA��X-31A�ϰ�װ�˸Ľ��ķɿ���������ʼ������֤��β�ɻ�ʹ������ʸ�������ȶ������Ŀ����ԡ����ڲ�����ȫ��ȥ����β�������ڲ���ʱ������һ���ִ�β����˽�����β���ԡ���β���Լƻ������ν��У���һ����38
000Ӣ��(Լ11 582��)�߶���������1.2���з��в��ԣ��ڴ˽������Ļ�������������ת��ƫ����Ͽ��ơ�30����б��ת��2g����ת��ȣ��ڶ��ΰ��������������ƽ�����Ŀ������жԵع������棬��ʱ���������ṩ��������С��Ҫ������ʸ���ܿ���ƫת�Ƕȣ���Ҳ���ڵ�����״̬�µ�һ��ʹ������ʸ����Ϊ��Ҫ�����ֶ������Ʒɻ��ķ��С���β������ʾ����β�ɻ��ڼ��������������������״�ɢ������(RCS)�ȷ������Խ�ԣ�֤����ȡ����β����������ʸ�����ƵĿ����ԣ������зɻ��ĸĽ���δ�������÷ɻ�����ƾ��н�����á�
|
|
����ע����ͼΪ���Ϲ�Ϊ������һ��ͼƬ��ΪX-31A����β���Է��С����Ա���ͼ���Ƿ���������Ƭ����ͬ�ģ��������б�Ȼ��һ����PS�ġ����˲�����ǣ�������ͼƬ��������NASA�ٷ�����ŷֱ�ΪED93-42152-10��EC93-42152-8������ʱ�䶼Ϊ1993�ꡣ��ͼ��β���мӹ��ĺۼ����ƺ���Ϊ���ɡ�
����NASA�ٷ��Ľ��ͣ���һ��ͼƬ��ȷΪPSͼ�� |
�̾�����֤(ESTOL)��
ʹ������ʸ�������ķɻ�����������Դ����ߣ����һ�����ǰ��δ�еĶ̾�����������������Ϊʹ������ʸ�������ķɻ��ij�������������������������ķ����������ڼ�С�ɻ�����غͽӵ��ٶȣ����̷ɻ��Ļ��ܾ��롣���⣬��������ʸ����ܺ�����ʵ���������ɻ��ڽ���֮����ƶ���Ҳ�����ߣ������½���ܾ�����������ˡ�2000��Ϊ�о���ʸ����β����Ŀ��VECTOR��������ʹ����X-31A�ɻ�������2001��2��24�յ�4��6�ս����˹��ܷ������顣VECTOR�����ƻ�Ϊ�������̾�������β�����о��ƻ����üƻ���Ŀ�ľ���ͨ�������ۺ�����ʸ�����ƣ�̽��X-31A��������̾���������
��X-31A����һ��֮��2002��5�£������������Ͳ�����˾���͵¹���������Ƽ���ɹ�����(BWB)���¹��վ���61��������(WTD)��ŷ���շ����뺽�켯��(EADS)���¹������о���(DLR)����ϵͳ�Ƽ�ѧԺ����VECTOR�����ƻ����Եĵڶ����Ρ������������ձ���������������������ϵͳ˾���NAVAIR������,��11��18�յķ��������У�X-31�ڿ���"�����ܵ���"�ֱ���12���14�㹥�ǽ�����֮���ڵڶ���������У��ɻ���24�㹥�ǽ�����½��X-31
VECTOR������������������ʼʵʩ��ʵ���ܵ��ϵ�ESTOL��½���飬�ɻ�����������ߴ�24�㡣VECTOR��Ŀ�������鸺�������ƣ�X-31װ��EADS�ṩ�ĸ���������ϵͳ(Flush
Air Data System��FADS)�������ǽ���߿ɴ�70�㡣һ����������ε�ʸ����β��Ŀ���飬X-31A�ɻ�������������ITP��˾�������ƽ�ʸ���������(������ʸ����ڽ����ڡ�ŷ��ս������EF2000,�б���˵���Ҳ�ƻ�����X-31AΪJAS-39�ĸĽ���������ʸ�����)��
|

